搜索
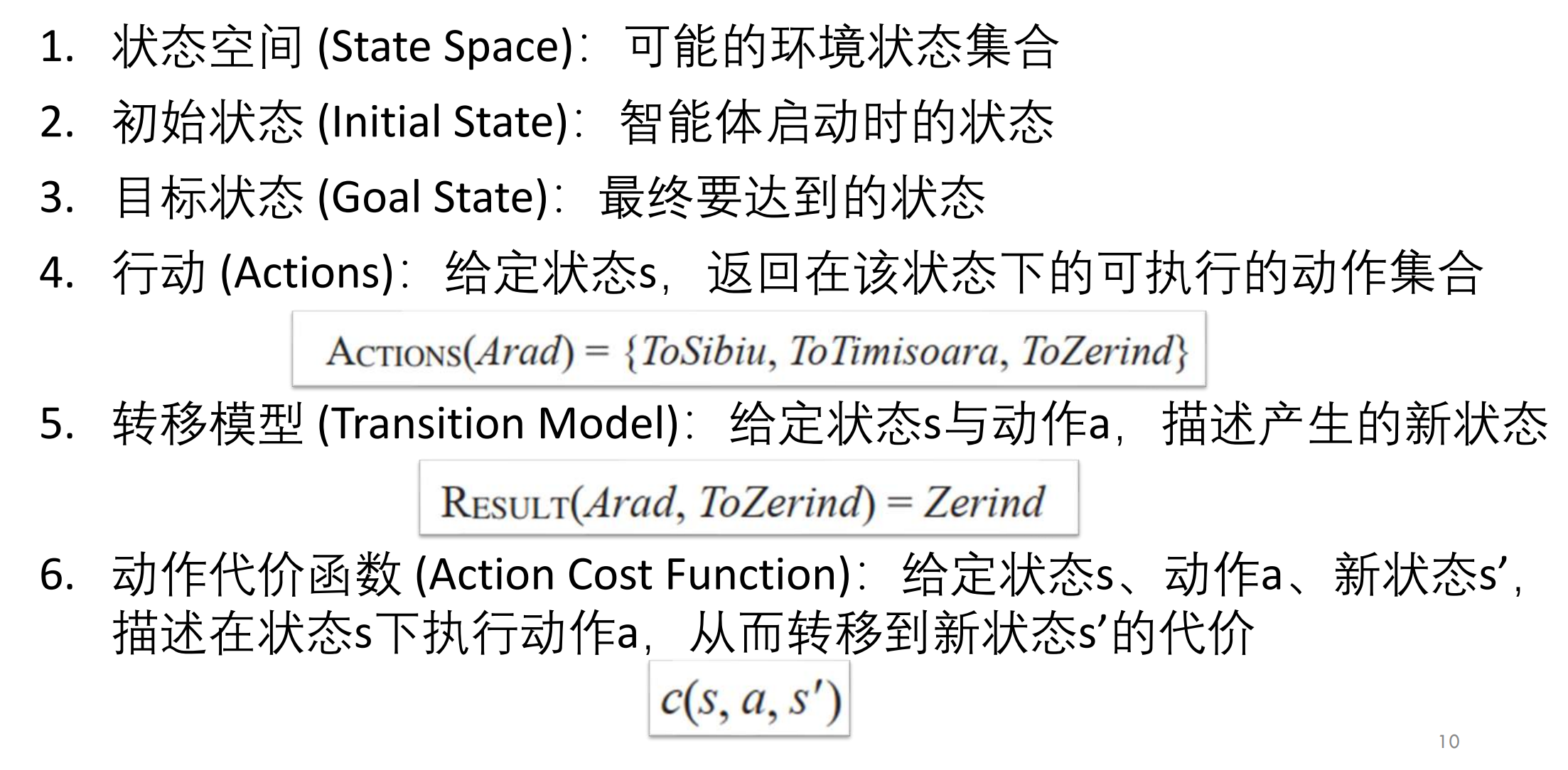
搜索问题的数学建模(状态空间图)
完备性:解存在时,算法能否保证找到。
代价最优性:算法能否找到代价最小的解。
时间复杂度:找到解所需的时间或操作数。
空间复杂度:执行算法所需的内存。
无信息搜索
算法不利用目标状态的任何领域知识,仅根据既定策略探索状态空间。
-
广度优先搜索BFS——像水一样在迷宫中蔓延
- 逐层扩展节点,先扩展根节点,再扩展其所有子节点,依此类推。
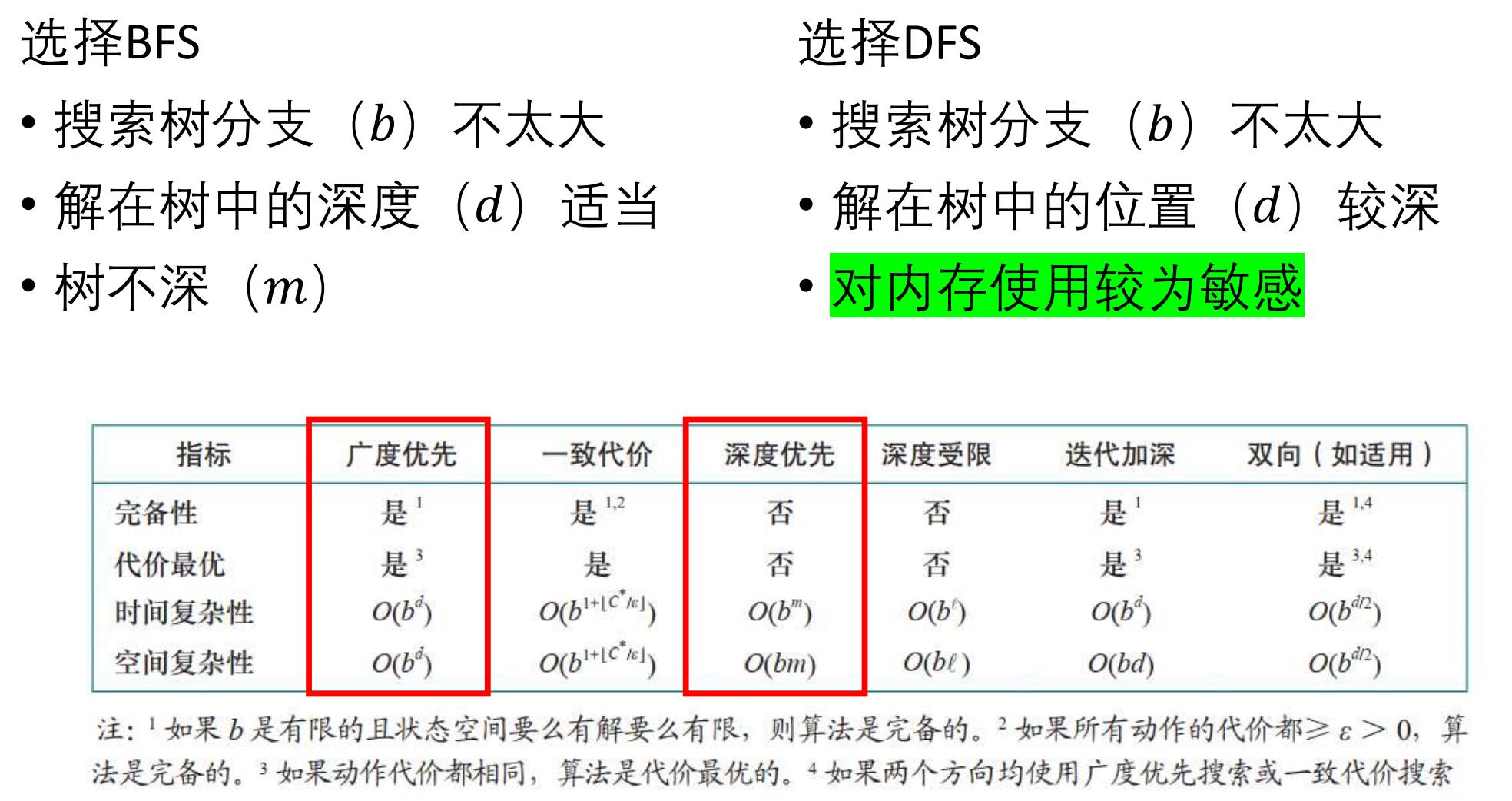
- 完备性:在分支因子有限时,是完备的(若解存在,则一定能找到)。
- 最优性:当所有动作代价相同时,BFS找到的是动作步数最少(即代价最小)的解。其最优性可通过反证法证明:假设存在一个更优解,其节点必然出现在更浅的层,但BFS会先访问到该节点,矛盾。
- 复杂度:在最坏情况下,时间和空间复杂度均为 O(b^d),其中b是分支因子,d是最浅解的深度。
-
深度优先搜索DFS——走入迷宫,不断尝试
- 优先深入探索一条路径,直到无法继续(叶子节点或达到深度限制),然后回溯。
- 完备性:在无限状态空间或存在环的情况下,不完备(可能陷入无限分支)。
- 最优性:不是最优的,可能找到非代价最小的解。
- 复杂度:最坏时间复杂度为 O(b^m),m是状态空间的最大深度;空间复杂度为 O(bm),因为只需存储当前路径和待探索的兄弟节点。
-
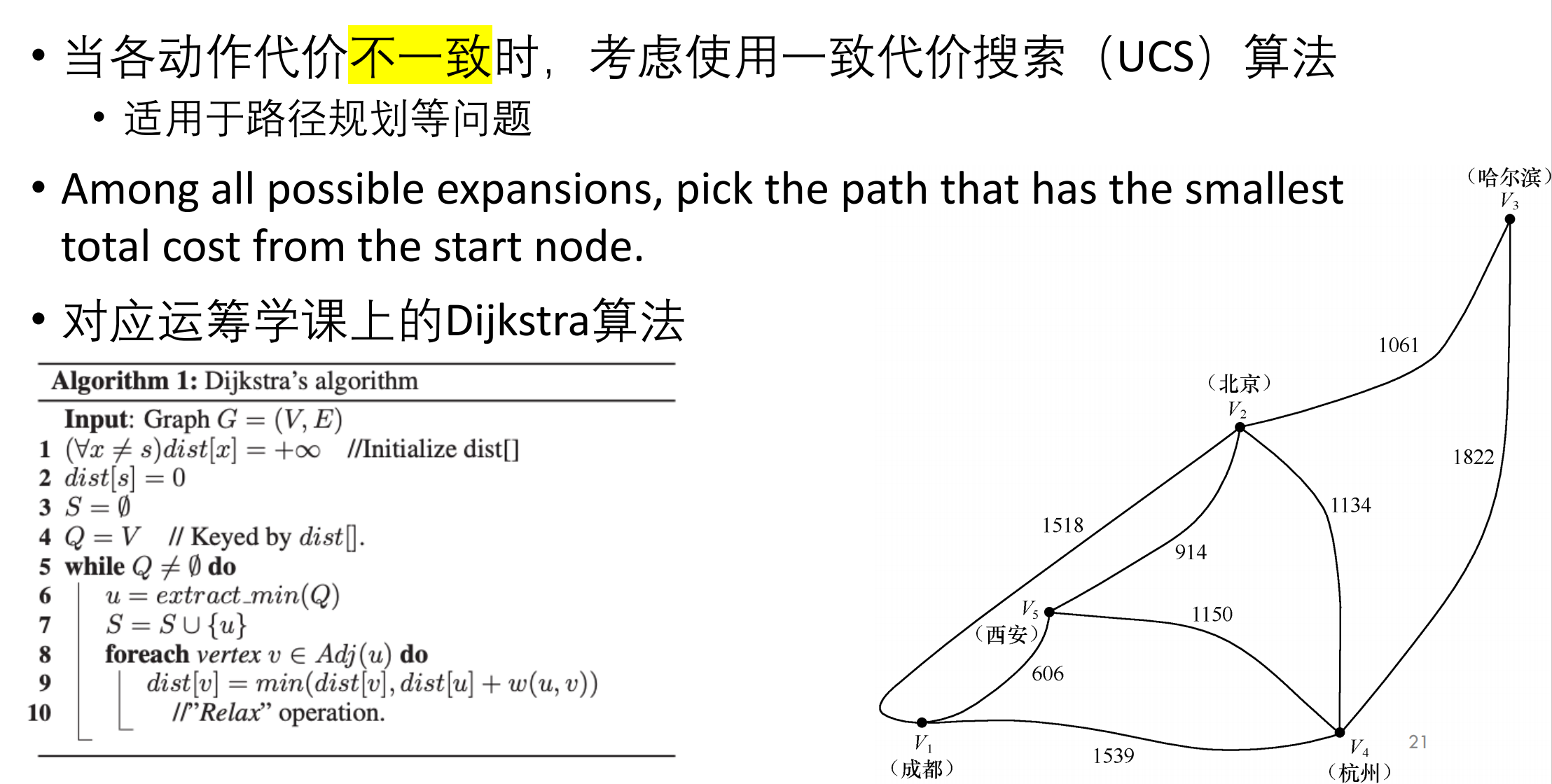
一致代价搜索——结点被到达的顺序就是代价的排序
- 扩展当前路径累积代价最小的节点。可视为在动作代价不均为1的图上的Dijkstra算法。
- 完备且代价最优。
指数爆炸问题:搜索算法的时间/空间复杂度通常是指数级的\( O(b^d) \),这限制了其在大型问题(如围棋)上的直接应用。
About 无信息搜索
在考试中给了一张图问你这是哪种搜索(选择题)
启发式搜索
现在,我们有了一些信息——算法利用启发式函数 h(n) 来估计从当前状态n到目标状态的最低代价,以指导搜索方向。
-
贪心策略
- 总是扩展 h(n) 值最小的节点,即估计最接近目标的节点。
- 性能:不完备(可能陷入死循环),也非最优,但通常较快。
-
A*搜索
- 结合UCS和贪婪搜索,评估函数为 f(n) = g(n) + h(n),其中g(n)是从起点到n的实际代价,h(n)是到目标的估计代价。总是扩展 f(n) 最小的节点。
- 可容许启发式:对于所有节点n,满足 0 ≤ h(n) ≤ h(n),其中h(n)是真实代价。定理:若启发式函数是可容许的,则A*算法是代价最优的。
- 一致性启发式:对于任意节点n及其后继n‘,满足 h(n) ≤ c(n, a, n’) + h(n‘)。一致性蕴含可容许性。在一致性启发式下,A*算法效率更高,每个节点最多被扩展一次。